
本文介绍了深度学习中卷积神经网络的(CNN)的基础知识。
1. 基础知识
1.1. 图像
图像在计算机中表示为一个 $height\times width$ 的 2 维的矩阵,矩阵的各个元素取值为颜色的值,可以表示为 $[0,1]$ 区间或 $[0,255]$ 区间的一个数。灰度图像是单通道的,彩色图像是三通道的(R,G,B)。
1.2. 卷积
卷积是原始图像与卷积核之间的滑动局部加乘计算过程。
狭义的卷积核(kernel)是一个矩阵,可在图像上滑动并与输入相乘,从而以某种我们期望的方式增强输出。
1.2.1. 单通道卷积
假设输入图片为 $6\times 6 \times 1\ channel$,卷积核为 $3\times 3$,stride=1(表示 kernel 的滑动步长为1),padding=1(表示对原始输入图像周围额外增加一层,配合stride=1,可以保证卷积后图片大小不变),则卷积过程如下图所示:
上面的kernel可用于锐化图像。比如,考虑下图所示的两个输入图像。
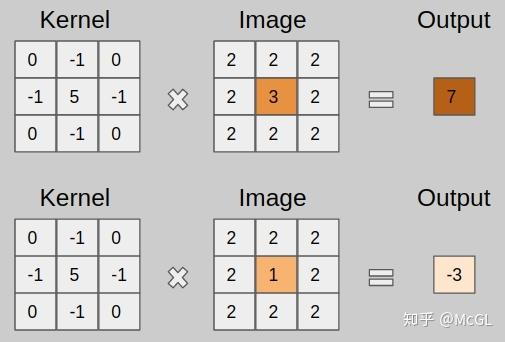
- 第一个图像,中心值为3 * 5 + 2 * -1 + 2 * -1 + 2 * -1 + 2 * -1 =7,值3增加到7。
- 第二个图像,输出是1 * 5 + 2 * -1 + 2 * -1 + 2 * -1 + 2 * -1 = -3,值1减少到-3。
显然,3和1之间的对比度增加到了7和-3,图像将更清晰锐利。
卷积后尺寸计算公式:
\[输出图像尺寸 = (输出图像尺寸-卷积核尺寸 + 2*填充值)/步长+1\]1.2.2. 多通道卷积
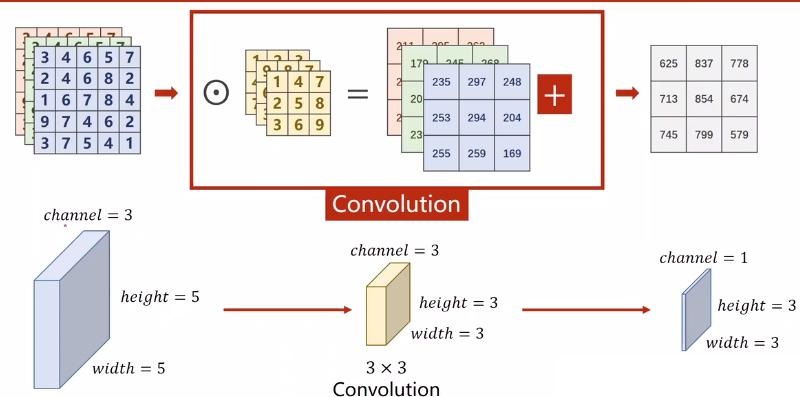
假设一个图像为 $5\times 5 \times 3\ channel$,此时,对于每一个通道均可以用一个卷积核进行卷积。此时,三个通道的卷积核串联起来,形成一个滤波器(filter)。在前面的单通道卷积中,卷积核就是一个单通道的 filter。
举例,采用 1 个 $3\ channel$ 的滤波器,每个通道的卷积核大小仍为 3x3,padding=0,stride=1。卷积过程如下,每一个通道的像素值与对应通道的卷积核的数值进行卷积,因此每一个通道会对应一个输出卷积结果,三个卷积结果对应位置累加 求和,得到最终的卷积结果。
上述过程中,每一个 滤波器 的通道数必须与输入图片的通道数 一致。
可以看出,一个 滤波器 最终到一个通道的特征图,则采用多个 滤波器 就可得到多个特征图,也即最终输出的特征图的通道数等于 滤波器 的个数。为什么要采用多个 滤波器 呢?因为一个 滤波器 提取特征是不充分的,需要添加多个 滤波器 去学习多种特征。
另外,滤波器 中不同通道上的卷积核的参数并不相同。
1.2.3. 权重
卷积核的值就是待学习的权重参数。网络训练时,输出的结果会和数据集标签做损失计算,然后把计算得到的损失反向梯度下降去更新卷积核里的每一个参数。所以卷积核里面的参数最终是训练得到的。
通过深层 CNN,我们无需再用手工设计的 kernel 来提取特征,而是可以直接学习这些可提取潜在特征的 kernel 值。
1.2.4. 偏置
每一个 滤波器 都包括一个偏置参数(bias)。这个偏置参数是该 滤波器 中所有 卷积核 共享的。最终的卷积结果需要在加上该偏置值。
1.2.5. 激活
卷积与偏置加和后的值,还需要再经过激活函数(比如 ReLU)才得到最终特征图上的值。
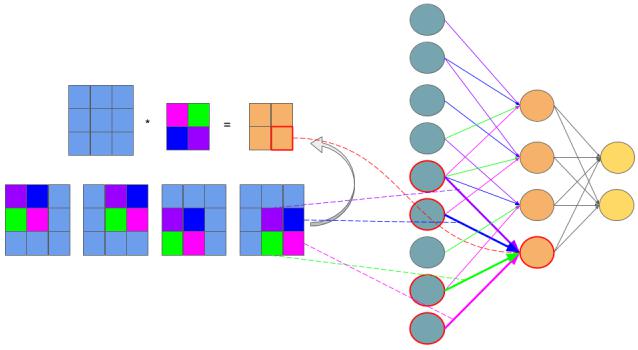
1.2.6. 共享权值
共享权值包括 共享权重 和 共享偏置。简而言之,卷积核的权重与偏置在卷积过程中保持不变。如下图所示,相同颜色的权值保持不变
1.2.7. 初始化
卷积核的权值是通过学习更新的,但是最开始是需要给这些参数提供初始值才能使网络运行。初始化方法可以简略分三种:
- 取偏差很小的高斯分布随机取值
- Xavier 初始化方法
- He kai ming 初始化方法
1.2.8. 卷积模式
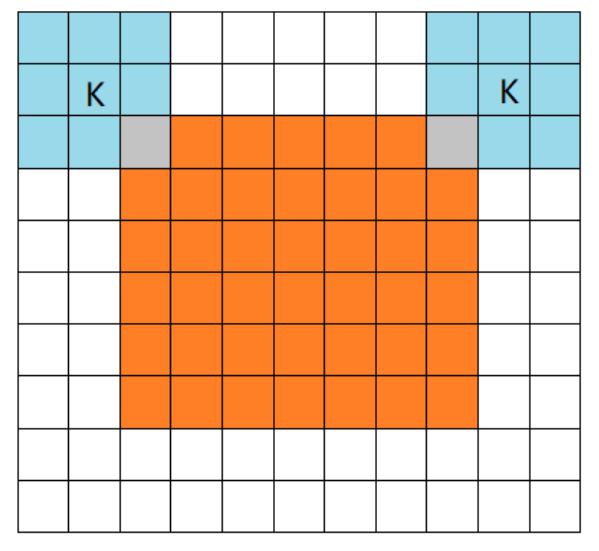
橙色部分为 image, 蓝色部分为 filter。
- full mode
full 模式的意思是,从 filter 和 image 刚相交开始做卷积,白色部分为填 0。filter 的运动范围如图所示。
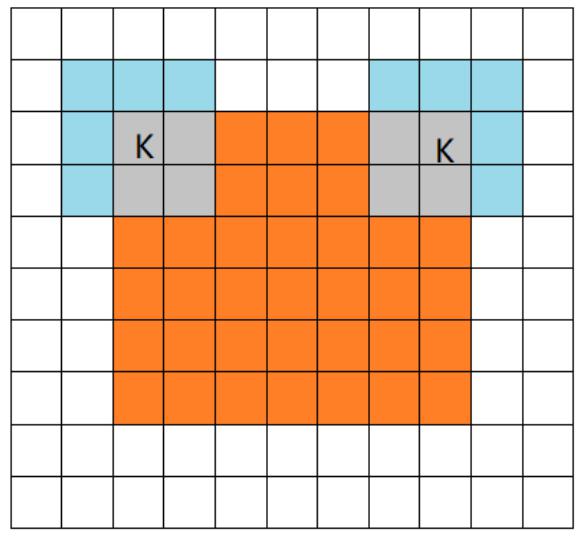
- same mode
当filter的中心 K 与 image 的边角重合时,开始做卷积运算。当卷积步长 stride = 1 时,卷积之后输出的 feature map 尺寸相对于输入图片保持不变(same)。
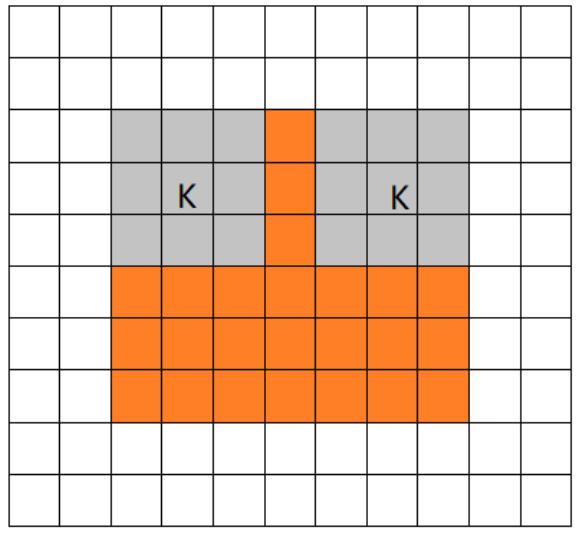
- valid mode
当filter全部在image里面的时候,进行卷积运算。
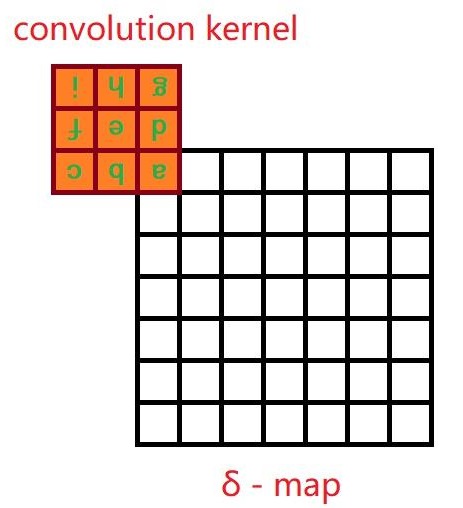
1.2.9. 反向传播
为了说明反向传播,需要先分析前向传播。假设卷积的前向传播采用 valid 模式。
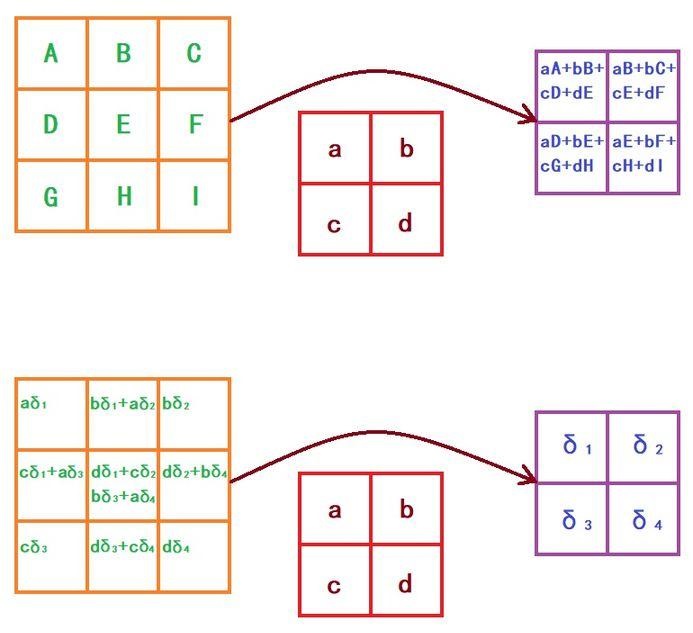
我们发现,当误差反向传播到卷积层时,我们的操作方法依然是一个卷积,只不过要把卷积核翻转(旋转180°),然后在周围补 0。注意到,前向传播采用 valid mode 卷积,反向传播时是 full mode 卷积,如图所示:
显然,如果前向传播是 full mode 卷积,那么反向传播就是 valid mode 卷积,不过依旧要将卷积核翻过来。
而对于 same mode 卷积,它的反向传播也是一个 same mode 卷积,同样也需要翻转卷积核。
最后,对于 strided 卷积(跨超过 1 步的卷积),反向传播是 fractional strided 卷积,反之依然。卷积核同样也要翻转。
1.3. 池化
池化层也称下采样层,会压缩输入的特征图,一方面减少了特征,导致了参数减少,进而简化了卷积网络计算时的复杂度;另一方面保持了特征的某种不变性(旋转、平移、伸缩等)。池化的思想来自于视觉机制,是对信息进行抽象的过程。
池化操作主要有两种,一种是平均池化(Average Pooling),即对邻域内的特征点求平均;另一种是最大池化(Max Pooling),即对邻域内的特征点取最大。
注意,池化也可以看作一种步长与卷积核相等的卷积,且卷积核参数固定不变。
注意,池化过程没有需要学习的参数。因此池化可以在不增加参数的情况下,大幅降低 feature map 的维度,节约开销。
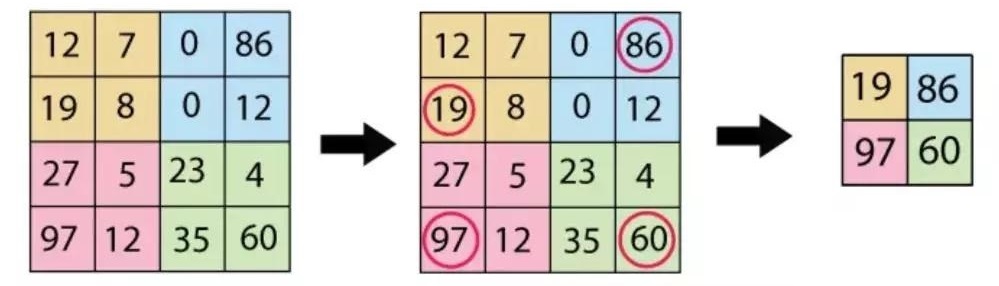
1.3.1. 最大池化
采用 $2\times 2$ 卷积核对 $4\times 4$ 图像的最大池化过程:
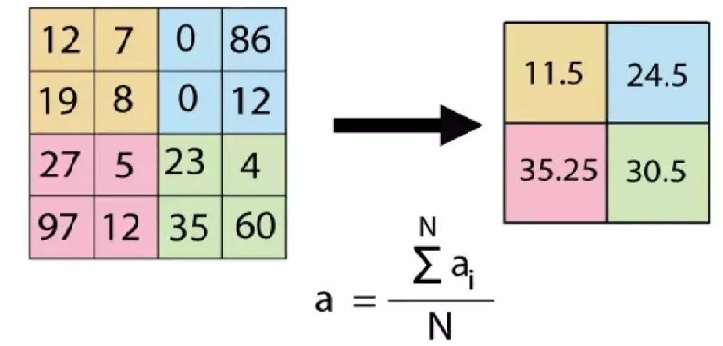
通常认为如果选取区域均值(mean pooling),往往能保留整体数据的特征,较好的突出背景信息。
1.3.2. 平均池化
采用 $2\times 2$ 卷积核对 $4\times 4$ 图像的平均池化过程:
如果选取区域最大值(max pooling),则能更好保留纹理特征。
1.3.3. 池化的好处
言有三. 池化是什么意思?
池化的好处:
- 增大感受野。所谓感受野,即一个像素对应回原图的区域大小,假如没有pooling,一个33,步长为1的卷积,那么输出的一个像素的感受野就是33的区域,再加一个stride=1的33卷积,则感受野为55。假如我们在每一个卷积中间加上3*3的pooling呢?很明显感受野迅速增大,这就是pooling的一大用处。感受野的增加对于模型的能力的提升是必要的,正所谓“一叶障目则不见泰山也”。
- 平移不变性。我们希望目标的些许位置的移动,能得到相同的结果。因为pooling不断地抽象了区域的特征而不关心位置,所以pooling一定程度上增加了平移不变性。
- 降低优化难度和参数。我们可以用步长大于1的卷积来替代池化,但是池化每个特征通道单独做降采样,与基于卷积的降采样相比,不需要参数,更容易优化。全局池化更是可以大大降低模型的参数量和优化工作量。
1.3.4. 反向传播
池化的反向传播比较简单。反向传播是要从缩小后的误差 $\delta^{l+1}$ 还原池化前较大 feature map 对应的误差 $\delta^l$。
假设采用步长为 1 的$2\times 2$ 池化,将 $4\times 4$ 的 feature map 池化为 $2\times 2$,如果 $\delta^{l+1}$ 的第 $k$ 个子矩阵为
\[\delta^{l+1}_k = \begin{bmatrix} 2 & 8\\ 4 & 6 \end{bmatrix}\]对于最大池化,需要在前向传播时,记住每个池化块中最大值的位置,然后将误差放回去即可。假设四个位置分别为左上,右下,右上,左下,则有
\[\delta^{l}_k = \begin{bmatrix} 2 &0&0& 0\\ 0&0&0&8\\ 0&4&0&0\\ 0&0&6&0 \end{bmatrix}\]对于平均池化,我们只需要将池化单元的误差平均值放回原来的子矩阵即可: \(\delta^{l}_k = \begin{bmatrix} 0.5&0.5&2&2\\ 0.5&0.5&2&2\\ 1&1&1.5&1.5\\ 1&1&1.5&1.5 \end{bmatrix}\)
2. 参考文献
[1] 木盏. 卷积的三种模式. CSDN.
[2] 永远在你身后. 卷积算法的另一种高效实现,as_strided详解. 知乎.